P9)太阳GPS的输入讯号分析
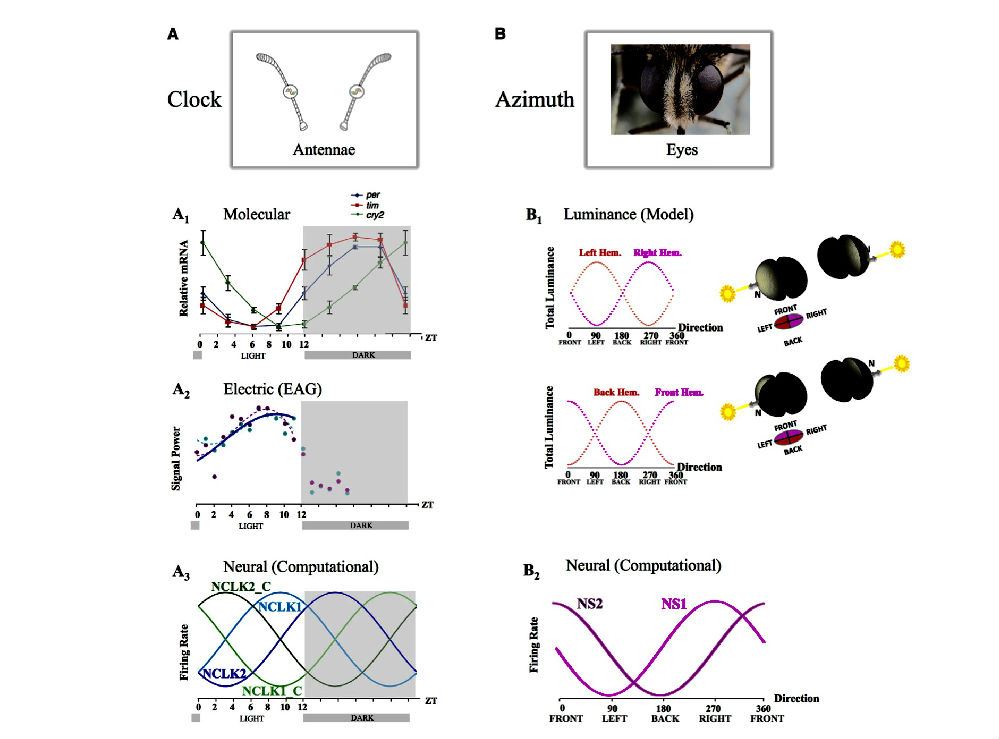
导航系统中用了两组输入讯号,它们分别是:
1)帝王蝶右复眼和前复眼的两个光度感应讯号。这两个讯号分别作为神经元NS1和NS2的放电频率讯号(见图9右B2)。
2)帝王蝶触须中的 per, tim, 和cry2三个生物电讯号。其中cry2作为神经元NCLK1_C的放电频率讯号,而 per/tim 作为神经元NCLK2的放电频率讯号,NCLK1为一个常数减去NCLK1_C,NCLK2_C是NCLK2的反相位函数(见图9左A3)。
Il=D1 D2 D1=NCLK1-NS1
Ir=-D1-D2=-Il D2=NCKL2-NS2
由上面简单公式处理后产生的讯号I就是该导航模型的控制输出讯号,更多细节请读注1原文。由该模型所作出导航轨迹与帝王蝶迁徙观察数据吻合。从该模型分析可得出,正午时导航方向正确稳定,清早和傍晚导航误差较大,这些结果与帝王蝶迁徙行为一致。简单地改变上述六个神经元的组合,模型也可以用于模擬帝王蝶春天后开始的向北迁徙行为。模型的建立清楚地解释了帝王蝶依靠“太阳GPS”万里迁徒的导航机制,模型也为蝴蝶和其它昆虫的导航研究提供了基础平台。如果弗雷徳能感知该项最新研究成果,我想他一定会含笑九泉。
导航系统中用了两组输入讯号,它们分别是:
1)帝王蝶右复眼和前复眼的两个光度感应讯号。这两个讯号分别作为神经元NS1和NS2的放电频率讯号(见图9右B2)。
2)帝王蝶触须中的 per, tim, 和cry2三个生物电讯号。其中cry2作为神经元NCLK1_C的放电频率讯号,而 per/tim 作为神经元NCLK2的放电频率讯号,NCLK1为一个常数减去NCLK1_C,NCLK2_C是NCLK2的反相位函数(见图9左A3)。
Il=D1 D2 D1=NCLK1-NS1
Ir=-D1-D2=-Il D2=NCKL2-NS2
由上面简单公式处理后产生的讯号I就是该导航模型的控制输出讯号,更多细节请读注1原文。由该模型所作出导航轨迹与帝王蝶迁徙观察数据吻合。从该模型分析可得出,正午时导航方向正确稳定,清早和傍晚导航误差较大,这些结果与帝王蝶迁徙行为一致。简单地改变上述六个神经元的组合,模型也可以用于模擬帝王蝶春天后开始的向北迁徙行为。模型的建立清楚地解释了帝王蝶依靠“太阳GPS”万里迁徒的导航机制,模型也为蝴蝶和其它昆虫的导航研究提供了基础平台。如果弗雷徳能感知该项最新研究成果,我想他一定会含笑九泉。
